Wisorobotics releases ALLEX humanoid simulation model, starts building a Physical AI ecosystem
The AMW Read
Introduces a new entrant using an open-simulation-first strategy in humanoid robotics; updates the player map in Segment 10 with a different go-to-market approach than closed competitors.
Wisorobotics releases ALLEX humanoid simulation model, starts building a Physical AI ecosystem
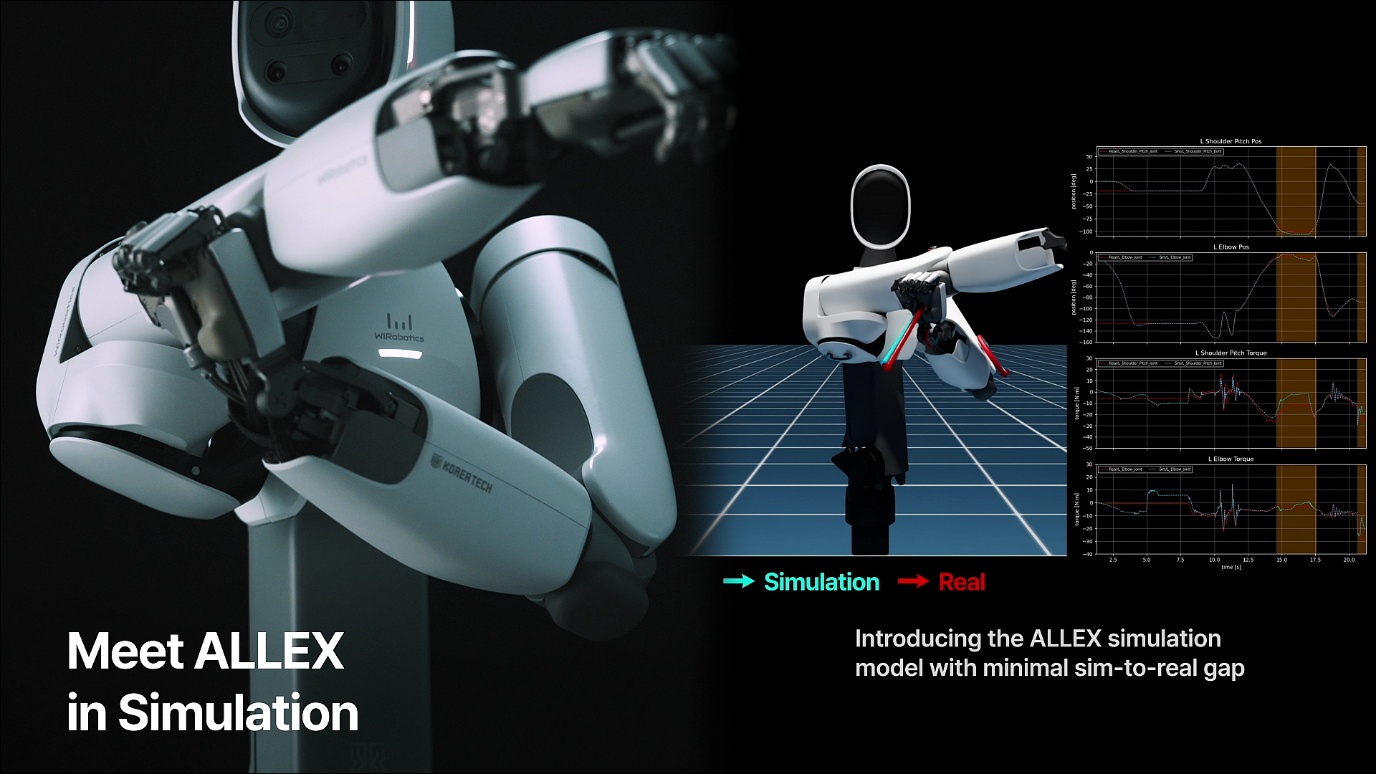
South Korean robotics firm Wisorobotics (위로보틱스) has released a simulation model of its ALLEX humanoid robot, allowing developers and researchers to study control, training, and synthetic data generation without physical hardware. The simulation model is provided in MJCF (MuJoCo), USD (Isaac Sim), and URDF (ROS) formats. The company also published Sim-to-Real validation results showing alignment between the simulation and the physical robot's backdrivability and force transparency. Wisorobotics plans to supply the ALLEX research platform by the end of 2026 and will gradually disclose core technologies accumulated during its humanoid development.
Why it matters: This move fits the 'open ecosystem as distribution moat' pattern that is becoming common in robotics hardware. By releasing a high-fidelity simulation model before the physical robot ships, Wisorobotics is effectively lowering the barrier for third-party developers to build on its platform — a strategy that mimics how NVIDIA's Isaac Sim ecosystem and Boston Dynamics' Spot SDK have seeded developer communities. If the Real-to-Sim fidelity holds, Wisorobotics could capture the 'early researcher lock-in' advantage, especially as universities and labs prefer simulation-first workflows over hardware ownership. This is an emerging counterpoint to closed humanoid platforms from Tesla Optimus and Figure.
The company's CEO emphasized that the simulation model is 'core infrastructure' for learning, validation, and synthetic data generation. The open release of multiple simulation formats suggests Wisorobotics is targeting the academic robotics community — a segment that often chooses MuJoCo and ROS for research — rather than just enterprise customers. The fact that the company is pre-revenue on hardware but already seeding the developer base signals a strategic bet on ecosystem-driven adoption, similar to what DeepSeek achieved in foundation models with open weights. However, hardware has fundamentally different unit economics: simulation adoption does not guarantee hardware orders, as many robotics simulation projects never transition to physical deployment.